#include <uwrovctr-module.h>
Public Member Functions | |
| UwROVCtrModule () | |
| virtual | ~UwROVCtrModule ()=default |
| virtual int | command (int argc, const char *const *argv) override |
| virtual void | initPkt (Packet *p) override |
| void | reset_retx () |
| virtual void | recv (Packet *) override |
| virtual void | recv (Packet *p, Handler *h) override |
| virtual void | transmit () override |
| virtual void | start () override |
 Public Member Functions inherited from UwCbrModule Public Member Functions inherited from UwCbrModule | |
| UwCbrModule () | |
| virtual | ~UwCbrModule ()=default |
| virtual double | GetRTT () const |
| virtual double | GetFTT () const |
| virtual double | GetTxTime () const |
| virtual double | GetPER () const |
| virtual double | GetTHR () const |
| virtual double | GetRTTstd () const |
| virtual double | GetFTTstd () const |
| virtual void | resetStats () |
| void | printIdsPkts () const |
Static Public Member Functions | |
| static int | getROVMonHeaderSize () |
| static int | getROVCTRHeaderSize () |
Protected Attributes | |
| int | sn |
| int | adaptiveRTO |
| double | adaptiveRTO_parameter |
| float | x_rov |
| float | y_rov |
| float | z_rov |
| float | newX |
| float | newY |
| float | newZ |
| float | speed |
| Position * | posit |
| Packet * | pkt |
| Protected Attributes inherited from UwCbrModule | |
| uint16_t | dstPort_ |
| std::string | log_suffix |
| nsaddr_t | dstAddr_ |
| char | priority_ |
| std::ofstream | tracefile |
| std::string | tracefilename |
| bool * | sn_check |
| int | PoissonTraffic_ |
| int | debug_ |
| int | drop_out_of_order_ |
| uint | traffic_type_ |
| UwSendTimer | sendTmr_ |
| int | txsn |
| int | hrsn |
| int | pkts_recv |
| int | pkts_ooseq |
| int | pkts_lost |
| int | pkts_invalid |
| int | pkts_last_reset |
| int | cnt |
| double | rftt |
| double | srtt |
| double | sftt |
| double | lrtime |
| double | sthr |
| double | period_ |
| int | pktSize_ |
| double | sumrtt |
| double | sumrtt2 |
| int | rttsamples |
| double | sumftt |
| double | sumftt2 |
| int | fttsamples |
| double | sumtxtimes = 0 |
| double | sumbytes |
| double | sumdt |
| uint32_t | esn |
| int | tracefile_enabler_ |
Additional Inherited Members | |
| Protected Member Functions inherited from UwCbrModule | |
| virtual void | sendPkt () |
| virtual void | sendPktLowPriority () |
| virtual void | sendPktHighPriority () |
| virtual void | stop () |
| virtual void | updateRTT (const double &) |
| virtual void | updateFTT (const double &) |
| virtual void | updateThroughput (const int &, const double &) |
| virtual void | incrPktLost (const int &) |
| virtual void | incrPktRecv () |
| virtual void | incrPktOoseq () |
| virtual void | incrPktInvalid () |
| virtual double | getTimeBeforeNextPkt () |
| virtual void | printReceivedPacket (Packet *p) |
| Static Protected Member Functions inherited from UwCbrModule | |
| static int | getCbrHeaderSize () |
| Static Protected Attributes inherited from UwCbrModule | |
| static int | uidcnt_ = 0 |
Detailed Description
UwROVCtrModule class is used to manage UWROVCtr packets and to collect statistics about them.
Constructor & Destructor Documentation
◆ UwROVCtrModule()
| UwROVCtrModule::UwROVCtrModule | ( | ) |
Constructor of UwROVCtrModule class.
References adaptiveRTO, and adaptiveRTO_parameter.
◆ ~UwROVCtrModule()
|
virtualdefault |
Destructor of UwROVCtrModule class.
Member Function Documentation
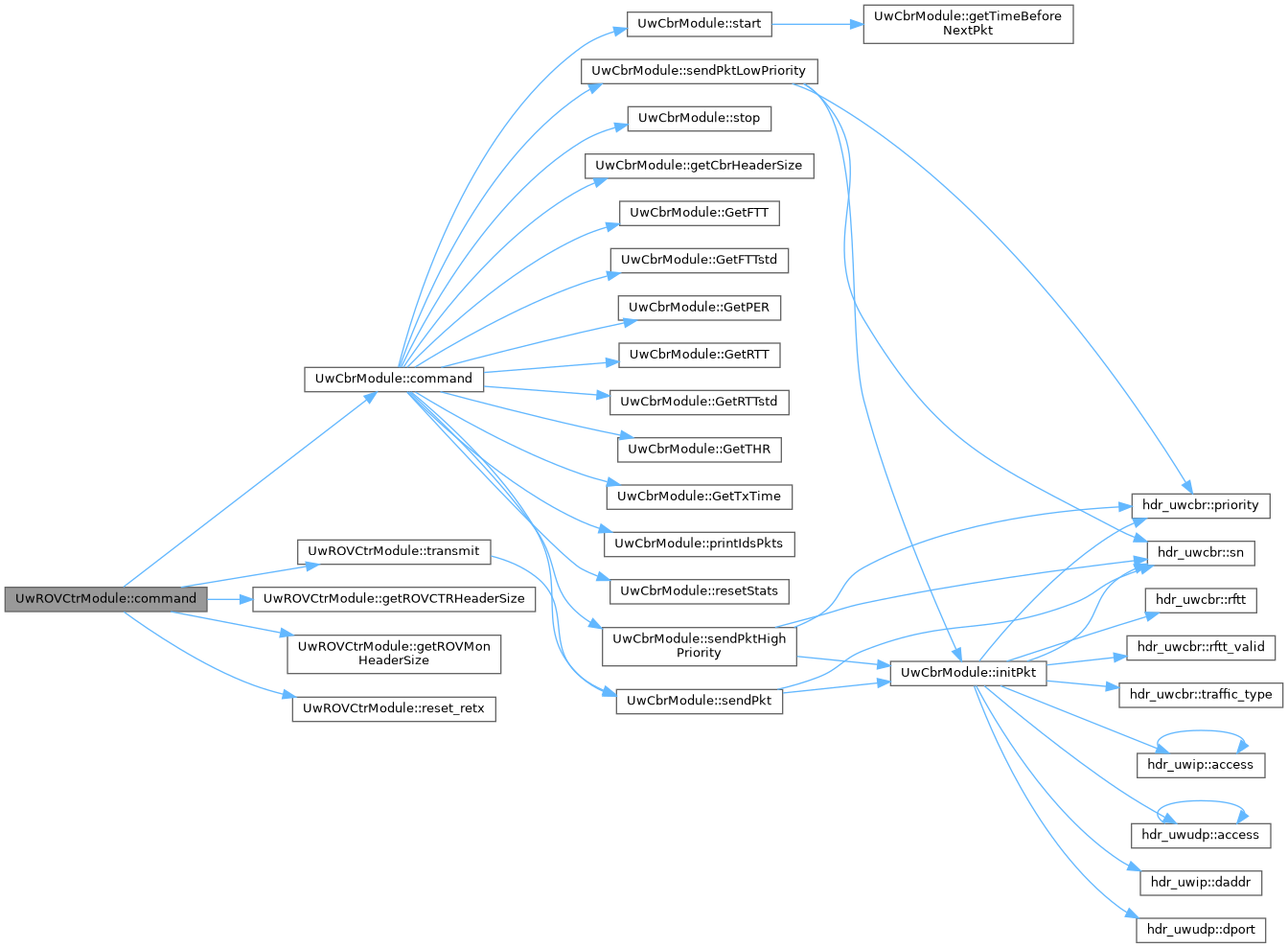
◆ command()
|
overridevirtual |
TCL command interpreter. It implements the following OTcl methods:
- Parameters
-
argc Number of arguments in argv. argv Array of strings which are the command parameters (Note that argv[0] is the name of the object).
- Returns
- TCL_OK or TCL_ERROR whether the command has been dispatched successfully or not.
Reimplemented from UwCbrModule.
Reimplemented in UwSCROVCtrModule.
References adaptiveRTO_parameter, UwCbrModule::command(), getROVCTRHeaderSize(), getROVMonHeaderSize(), newX, newY, newZ, posit, reset_retx(), speed, and transmit().
Referenced by UwSCROVCtrModule::command().
◆ getROVCTRHeaderSize()
|
inlinestatic |
Returns the size in byte of a hdr_uwROV_ctr packet header.
- Returns
- The size of a hdr_uwROV_monitoring packet header.
Referenced by command().
◆ getROVMonHeaderSize()
|
inlinestatic |
Returns the size in byte of a hdr_uwROV_monitoring packet header.
- Returns
- The size of a hdr_uwROV_monitoring packet header.
Referenced by command().
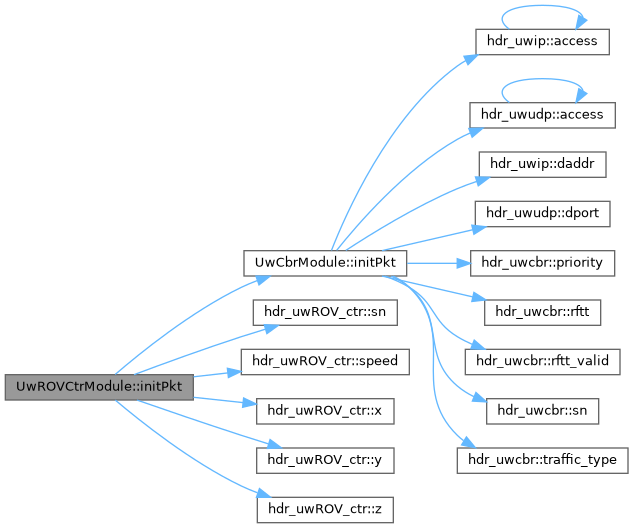
◆ initPkt()
|
overridevirtual |
Initializes a control data packet passed as argument with the default values.
- Parameters
-
Packet* Pointer to a packet already allocated to fill with the right values.
Reimplemented from UwCbrModule.
References UwCbrModule::debug_, UwCbrModule::initPkt(), newX, newY, newZ, pkt, UwCbrModule::rttsamples, hdr_uwROV_ctr::sn(), sn, hdr_uwROV_ctr::speed(), speed, UwCbrModule::sumrtt, hdr_uwROV_ctr::x(), hdr_uwROV_ctr::y(), and hdr_uwROV_ctr::z().
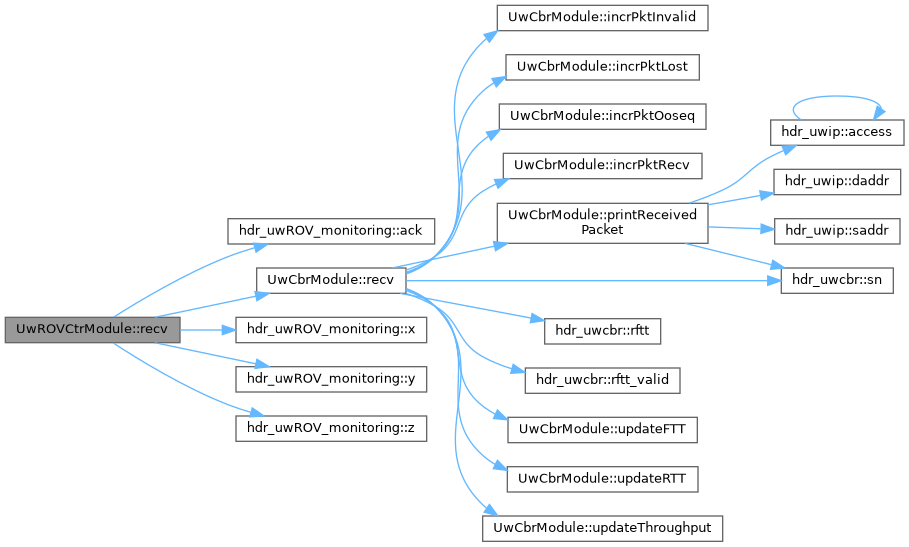
◆ recv() [1/2]
|
overridevirtual |
Performs the reception of packets from upper and lower layers.
- Parameters
-
Packet* Pointer to the packet will be received.
Reimplemented from UwCbrModule.
Reimplemented in UwSCROVCtrModule.
References hdr_uwROV_monitoring::ack(), UwCbrModule::debug_, pkt, UwCbrModule::recv(), UwCbrModule::sendTmr_, sn, hdr_uwROV_monitoring::x(), x_rov, hdr_uwROV_monitoring::y(), y_rov, hdr_uwROV_monitoring::z(), and z_rov.
Referenced by UwSCROVCtrModule::recv(), and recv().
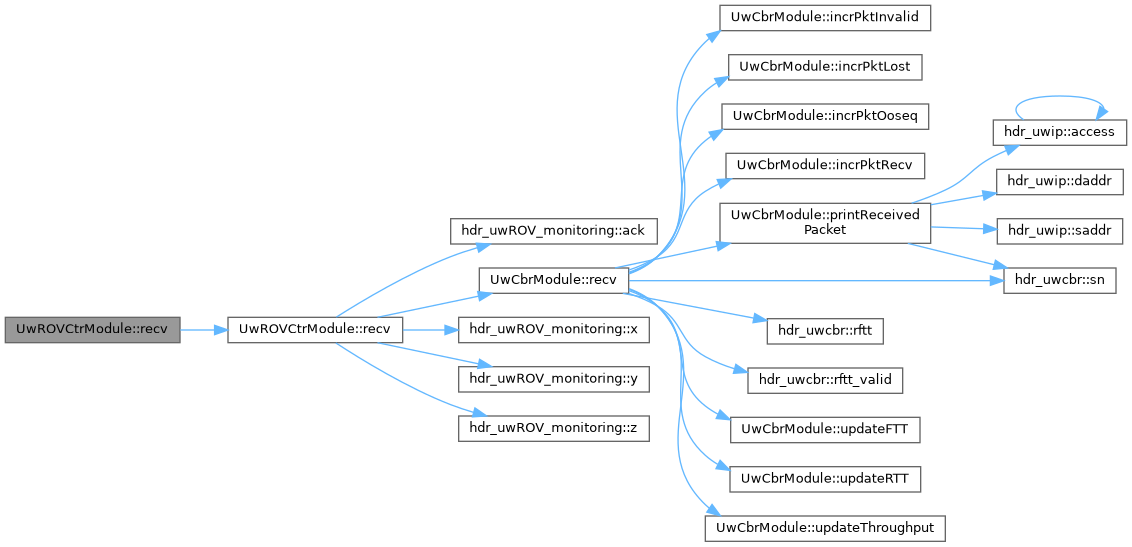
◆ recv() [2/2]
|
overridevirtual |
Performs the reception of packets from upper and lower layers.
- Parameters
-
Packet* Pointer to the packet will be received. Handler* Handler.
Reimplemented from UwCbrModule.
References recv().
◆ reset_retx()
|
inline |
Reset retransmissions
References pkt, and UwCbrModule::sendTmr_.
Referenced by command(), UwSCROVCtrModule::command(), and UwSCROVCtrModule::recvSyncClMsg().
◆ start()
|
overridevirtual |
Start the controller.
Reimplemented from UwCbrModule.
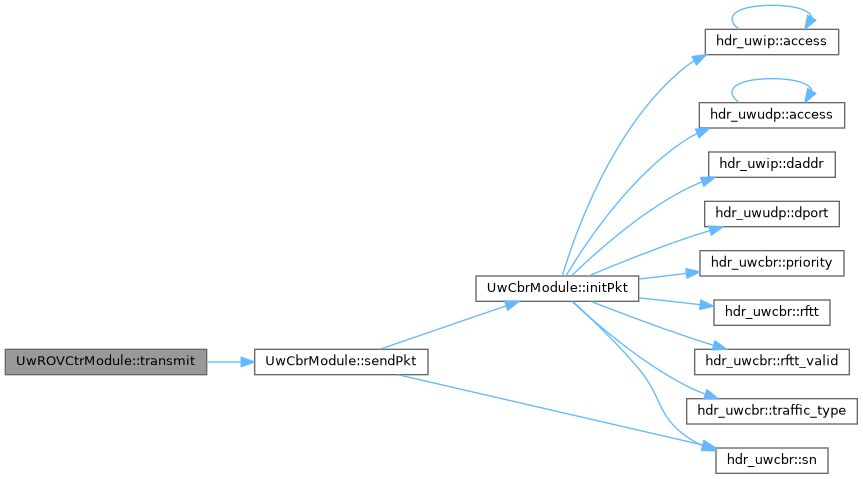
◆ transmit()
|
overridevirtual |
Creates and transmits a packet.
- See also
- UwCbrModule::sendPkt()
Reimplemented from UwCbrModule.
References adaptiveRTO, adaptiveRTO_parameter, UwCbrModule::debug_, UwCbrModule::period_, UwCbrModule::rttsamples, UwCbrModule::sendPkt(), UwCbrModule::sendTmr_, and UwCbrModule::sumrtt.
Referenced by command(), UwSCROVCtrModule::command(), and UwSCROVCtrModule::recvSyncClMsg().
Member Data Documentation
◆ adaptiveRTO
|
protected |
Sequence number of the last control packet sent. 1 if an adaptive RTO is used, 0 if a constant RTO is used.
Referenced by transmit(), and UwROVCtrModule().
◆ adaptiveRTO_parameter
|
protected |
Parameter for the adaptive RTO.
Referenced by command(), transmit(), and UwROVCtrModule().
◆ newX
|
protected |
X of the new position sent to the ROV.
Referenced by command(), UwSCROVCtrModule::command(), initPkt(), and UwSCROVCtrModule::recvSyncClMsg().
◆ newY
|
protected |
Y of the new position sent to the ROV.
Referenced by command(), UwSCROVCtrModule::command(), initPkt(), and UwSCROVCtrModule::recvSyncClMsg().
◆ newZ
|
protected |
Z of the new position sent to the ROV.
Referenced by command(), UwSCROVCtrModule::command(), initPkt(), and UwSCROVCtrModule::recvSyncClMsg().
◆ pkt
|
protected |
Referenced by initPkt(), recv(), and reset_retx().
◆ posit
|
protected |
Controller position.
Referenced by command().
◆ sn
◆ speed
|
protected |
Moving speed sent to the ROV.
Referenced by command(), UwSCROVCtrModule::command(), and initPkt().
◆ x_rov
|
protected |
X of the last ROV position monitored.
Referenced by recv(), and UwSCROVCtrModule::recvSyncClMsg().
◆ y_rov
|
protected |
Y of the last ROV position monitored.
Referenced by recv(), and UwSCROVCtrModule::recvSyncClMsg().
◆ z_rov
|
protected |
Z of the last ROV position monitored.
Referenced by recv(), and UwSCROVCtrModule::recvSyncClMsg().
The documentation for this class was generated from the following files:
- DESERT_Addons/uwrov/uwrovctr-module.h
- DESERT_Addons/uwrov/uwrovctr-module.cc