#include <udpposition.h>
◆ UDPPosition()
| UDPPosition::UDPPosition |
( |
| ) |
|
◆ ~UDPPosition()
| virtual UDPPosition::~UDPPosition |
( |
| ) |
|
|
virtualdefault |
◆ command()
| int UDPPosition::command |
( |
int |
argc, |
|
|
const char *const * |
argv |
|
) |
| |
|
virtual |
TCL command interpreter setdest <integer value>integer value>integer value>: set the movement pattern: the firts two values define the point to be reached (i.e., the direction of the movement) and the third value defines the speed to be used
Moreover it inherits all the OTcl method of Position
- Parameters
-
| argc | number of arguments in argv |
| argv | array of strings which are the comand parameters (Note that argv[0] is the name of the object) |
- Returns
- TCL_OK or TCL_ERROR whether the command has been dispatched succesfully or no
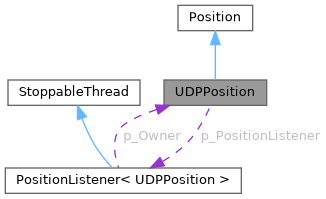
References debug_, m_SocketReadTimeout, m_UdpReceivePort, p_PositionListener, StoppableThread::Running(), StoppableThread::Start(), and StoppableThread::Stop().
◆ debugLevel()
| int UDPPosition::debugLevel |
( |
| ) |
const |
|
inline |
◆ getX()
| double UDPPosition::getX |
( |
| ) |
|
|
virtual |
Method that return the current projection of the node on the x-axis. If it's necessary (updating time ia expired), update the position values before returns it.
References mutex_.
◆ getY()
| double UDPPosition::getY |
( |
| ) |
|
|
virtual |
Method that return the current projection of the node on the y-axis. If it's necessary (updating time ia expired), update the position values before returns it.
References mutex_.
◆ getZ()
| double UDPPosition::getZ |
( |
| ) |
|
|
virtual |
Method that return the current projection of the node on the z-axis. If it's necessary (updating time ia expired), update the position values before returns it.
References mutex_.
◆ setPosition()
◆ setX()
| void UDPPosition::setX |
( |
double |
x | ) |
|
|
virtual |
◆ setY()
| void UDPPosition::setY |
( |
double |
y | ) |
|
|
virtual |
◆ setZ()
| void UDPPosition::setZ |
( |
double |
z | ) |
|
|
virtual |
◆ debug_
◆ m_SocketReadTimeout
| unsigned int UDPPosition::m_SocketReadTimeout {50000} |
|
private |
Socket timeout for select() call in [us]
Referenced by command().
◆ m_UdpReceivePort
| unsigned int UDPPosition::m_UdpReceivePort |
|
private |
◆ mutex_
| std::mutex UDPPosition::mutex_ |
|
private |
◆ p_PositionListener
The documentation for this class was generated from the following files: