#include <uwPosBasedRtROV.h>
Public Member Functions | |
| UwPosBasedRtROV () | |
| virtual | ~UwPosBasedRtROV () |
Protected Member Functions | |
| virtual int | command (int, const char *const *) |
| virtual void | recv (Packet *p) |
| virtual void | initPkt (Packet *p) |
| virtual uint8_t | findNextHop (const Packet *p) |
| virtual void | setMaxTxRange (double newRange) |
Private Types | |
| typedef std::pair< Position, uint8_t > | pair_posIP |
Private Member Functions | |
| virtual double | nodesDistance (Position &p1, Position &p2) |
Private Attributes | |
| uint8_t | ipAddr |
| double | maxTxRange |
| UWSMPosition * | ROV_pos |
| std::list< pair_posIP > | list_posIP |
| int | debug_ |
Member Typedef Documentation
◆ pair_posIP
|
private |
Constructor & Destructor Documentation
◆ UwPosBasedRtROV()
| UwPosBasedRtROV::UwPosBasedRtROV | ( | ) |
Constructor of UwPosBasedRtROV class
References debug_, and maxTxRange.
◆ ~UwPosBasedRtROV()
|
virtual |
Destructor of UwPosBasedRtROV class
Member Function Documentation
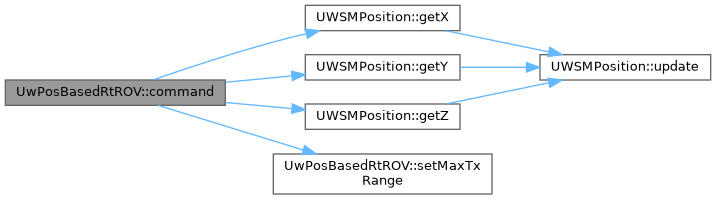
◆ command()
|
protectedvirtual |
TCL command interpreter. It implements the following OTcl methods:
- Parameters
-
argc Number of arguments in argv. argv Array of strings which are the command parameters (Note that argv[0] is the name of the object).
- Returns
- TCL_OK or TCL_ERROR whether the command has been dispatched successfully or not.
References UWSMPosition::getX(), UWSMPosition::getY(), UWSMPosition::getZ(), ipAddr, list_posIP, ROV_pos, and setMaxTxRange().
◆ findNextHop()
|
protectedvirtual |
Find next hop of a packet passed as input
- Parameters
-
Packet* Pointer to the packet will be received.
References debug_, ipAddr, list_posIP, maxTxRange, nodesDistance(), and ROV_pos.
Referenced by recv().

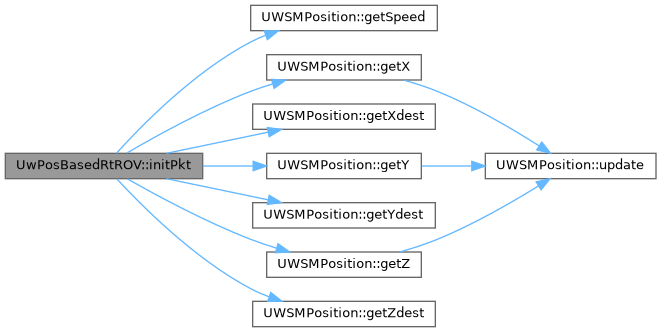
◆ initPkt()
|
protectedvirtual |
Initialize field of hdr_uwpos_based_rt
- Parameters
-
Packet* Pointer to the packet will be received.
References debug_, UWSMPosition::getSpeed(), UWSMPosition::getX(), UWSMPosition::getXdest(), UWSMPosition::getY(), UWSMPosition::getYdest(), UWSMPosition::getZ(), UWSMPosition::getZdest(), ipAddr, and ROV_pos.
Referenced by recv().
◆ nodesDistance()
|
privatevirtual |
Compute absoulute distance between 2 nodes
- Parameters
-
Position position first node. Position position second node.
Referenced by findNextHop().
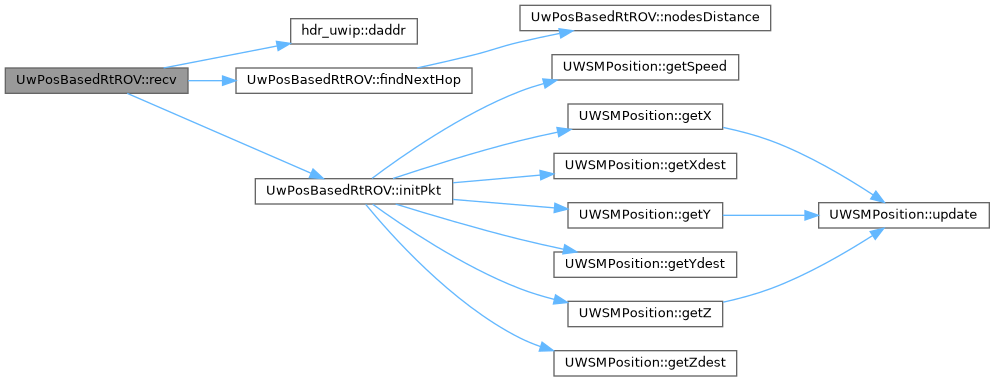
◆ recv()
|
protectedvirtual |
Performs the reception of packets from upper and lower layers.
- Parameters
-
Packet* Pointer to the packet will be received.
References hdr_uwip::daddr(), debug_, findNextHop(), initPkt(), and ipAddr.
◆ setMaxTxRange()
|
protectedvirtual |
Set maximum transmission range
- Parameters
-
float New value for transmission range.
References debug_, ipAddr, and maxTxRange.
Referenced by command().
Member Data Documentation
◆ debug_
|
private |
Flag to enable or disable dirrefent levels of debug.
Referenced by findNextHop(), initPkt(), recv(), setMaxTxRange(), and UwPosBasedRtROV().
◆ ipAddr
|
private |
Referenced by command(), findNextHop(), initPkt(), recv(), and setMaxTxRange().
◆ list_posIP
|
private |
List with position of all the other nodes with its IP.
Referenced by command(), and findNextHop().
◆ maxTxRange
|
private |
Maximum transmission range, in meters, for this node.
Referenced by findNextHop(), setMaxTxRange(), and UwPosBasedRtROV().
◆ ROV_pos
|
private |
Pointer to ROV position. Give ROV position via TCL command.
Referenced by command(), findNextHop(), and initPkt().
The documentation for this class was generated from the following files:
- DESERT_Framework/DESERT/network/uwPositionBasedRouting/uwPosBasedRtROV.h
- DESERT_Framework/DESERT/network/uwPositionBasedRouting/uwPosBasedRtROV.cpp