#include <uwsc-mission-coordinator-module.h>
UwMissionCoordinatorModule class is used to manage AUV followers and to collect statistics about them.
◆ AUV_stats
AUV_stats describes statistics about the AUV follower. It also contains ids of respectively the UwROV controller and UwTracker receiver module installed in the AUV leader.
◆ Mine
Mine describes a mine by its position and state.
◆ UwMissionCoordinatorModule()
| UwMissionCoordinatorModule::UwMissionCoordinatorModule |
( |
| ) |
|
◆ ~UwMissionCoordinatorModule()
| virtual UwMissionCoordinatorModule::~UwMissionCoordinatorModule |
( |
| ) |
|
|
virtualdefault |
◆ command()
| int UwMissionCoordinatorModule::command |
( |
int |
argc, |
|
|
const char *const * |
argv |
|
) |
| |
|
overridevirtual |
TCL command interpreter. It implements the following OTcl methods:
- Parameters
-
| argc | Number of arguments in argv. |
| argv | Array of strings which are the command parameters (Note that argv[0] is the name of the object). |
- Returns
- TCL_OK or TCL_ERROR whether the command has been dispatched successfully or not.
References auv_follower.
◆ isTracked()
| bool UwMissionCoordinatorModule::isTracked |
( |
Position * |
p | ) |
const |
|
protected |
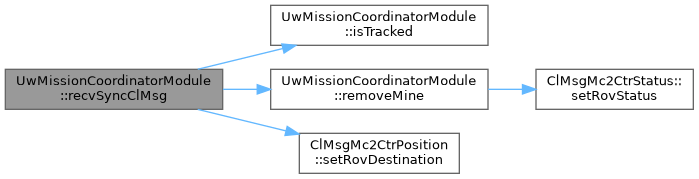
Check if the mine at received position is already tracked.
- Parameters
-
| Position* | Pointer to mine position |
- Returns
- bool True if the mine is already tracked false otherwise
References auv_follower.
Referenced by recvSyncClMsg().
◆ recvSyncClMsg()
| int UwMissionCoordinatorModule::recvSyncClMsg |
( |
ClMessage * |
m | ) |
|
|
overridevirtual |
◆ removeMine()
| void UwMissionCoordinatorModule::removeMine |
( |
int |
id | ) |
|
|
protected |
◆ auv_follower
| std::vector<AUV_stats> UwMissionCoordinatorModule::auv_follower |
|
protected |
The documentation for this class was generated from the following files: